OpenAI ensina mão robótica a resolver o cubo mágico
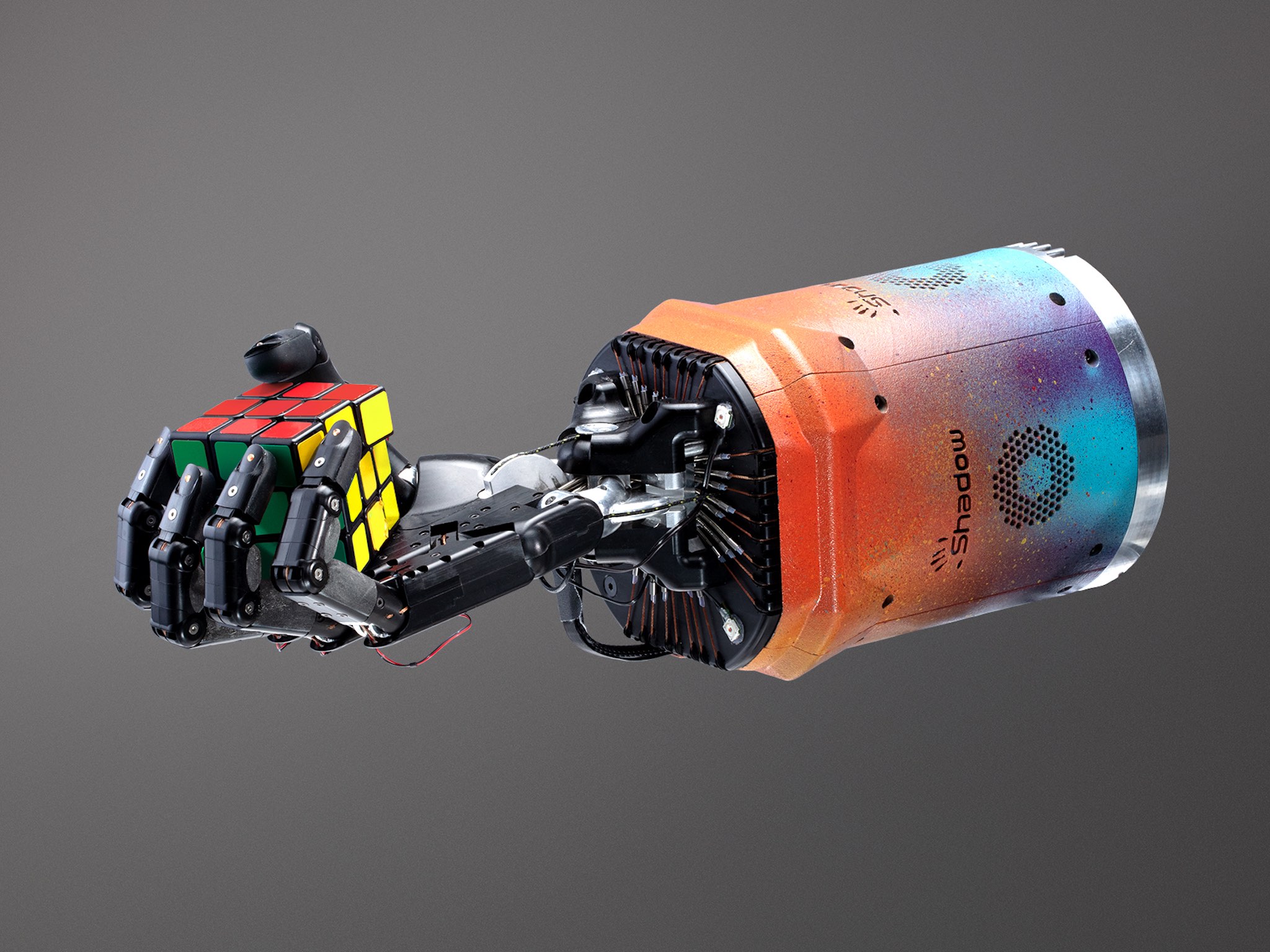
Mão robótica projetada pela OpenAI segurando um cubo mágico | Créditos da imagem: OpenAI
Por Evan Ackerman | Conteúdo IEEE Spectrum
Manipulação manual é uma habilidade que os humanos em geral não desenvolvem ativamente. Resolvemos isso realizando outras tarefas mais específicas com nossos dedos e mãos. Isso torna particularmente difícil ensinar robôs a resolver tarefas de manipulação manual, pois a maneira como fazemos é através de experimentação, tentativa e erro. Os robôs também podem aprender por tentativa e erro, mas como geralmente acaba sendo principalmente erro, leva muito, muito tempo.
O método usado pela OpenAI, de ensinar uma mão robótica de cinco dedos a manipular um cubo, alavancou o mesmo tipo de experimentação, tentativa e erro, mas na simulação, e não no hardware do robô. Para tarefas complexas que exigem muita sutileza, a simulação geralmente se traduz mal em habilidades do mundo real, mas a OpenAI tornou seu sistema super robusto, introduzindo um monte de aleatoriedades na simulação durante o processo de treinamento. Dessa forma, mesmo que a simulação não correspondesse perfeitamente à realidade (o que não era), o sistema ainda poderia lidar com os tipos de variações experimentadas no hardware do mundo real.
Em um artigo publicado no dia 15 de outubro, a OpenAI conseguiu ensinar a mão de seu robô a resolver uma versão muito mais difícil da manipulação: solução com uma das mãos de um cubo mágico. O novo trabalho também se baseia na ideia de resolver um problema usando simulações avançadas e depois transferir a solução para um sistema do mundo real, ou o que os pesquisadores chamam de “sim2real”. No artigo, a OpenAI diz que a nova abordagem é uma “transferência sim2real amplamente aprimorada.”
O passo inicial foi dividir a manipulação em duas tarefas diferentes: 1) girar uma única face do cubo 90 graus em qualquer direção; 2) virar o cubo para trazer uma face diferente para o topo. Como girar a face superior é muito mais simples para o robô do que girar outras faces, a estratégia mais confiável é fazer um giro de 90 graus para obter a face que você deseja girar por cima. Embora o processo de solução seja otimizado para os movimentos que o robô pode executar e não para a solução que levaria o menor número de etapas.
A configuração física que está resolvendo os cubos no mundo real é uma Shadow Dexterous E Series Hand com um sistema de captura de movimento, além de câmeras RGB para estimativa de pose visual. O cubo que está sendo manipulado também é bastante chique: está cheio de sensores que relatam a orientação de cada face com uma precisão de cinco graus, o que é necessário porque, caso contrário, é muito difícil conhecer o estado do cubo mágico quando algumas de suas faces estão concluídas.
Embora o vídeo facilite o foco no robô físico, a mágica está acontecendo principalmente na transferência de coisas aprendidas na simulação para o mundo real. Novamente, a chave para isso é a aleatorização de domínio – tremendo partes da simulação, para que seu sistema precise se adaptar a diferentes situações semelhantes às que podem ser encontradas no mundo real. Por exemplo, talvez você altere levemente o peso do cubo, altere um pouco a fricção das pontas dos dedos ou diminua a iluminação. Se o seu sistema puder lidar com essas variações simuladas, será mais robusto para a operação no mundo real.
Clique aqui para ler a reportagem original na íntegra.